



1 树的基本概念
节点 (Node): 树的基本组成部分,每个节点存储数据和指向其他节点的链接。图中的每个方框都是一个节点。
根节点 (Root): 树的顶端节点,没有父节点。一棵树只有一个根。
父节点 (Parent) & 子节点 (Child): 一个节点指向的节点是它的子节点,指向它的节点是它的父节点。
边 (Edge): 连接两个节点的线。
叶子节点 (Leaf): 没有子节点的节点,也叫终端节点。
子树 (Subtree): 任何一个节点及其所有后代节点组成的结构,本身也是一棵树。
深度 (Depth): 从根节点到该节点所经过的边的数量。根的深度为 0。
高度 (Height): 从该节点到最远的叶子节点所经过的边的数量。所有叶子节点的高度为 0。树的高度等于根节点的高度。
2 二叉树 & 二叉搜索树 (BST)
2.1 二叉树 (Binary Tree)
这是一种特殊的树,其中每个节点最多有两个子节点,通常称为左子节点和右子节点。
二叉树的遍历(Traversal):
1 深度优先遍历 (DFS - Depth-First Search)
中序遍历 (In-order)
顺序:左子树 -> 根节点 -> 右子树
结果:对 BST 进行中序遍历,会得到一个升序排列的序列。极其有用!
先序遍历 (Pre-order)
顺序:根节点 -> 左子树 -> 右子树
应用:可用于复制一棵树的结构。
后序遍历 (Post-order)
顺序:左子树 -> 右子树 -> 根节点
应用:常用于删除树节点(先删除子节点再删父节点)或计算目录大小。
2 广度优先遍历 (BFS - Breadth-First Search) (层序遍历)
层序遍历(Level-order)
实现:通常使用队列 (Queue) 辅助实现。
2.2 二叉搜索树 (Binary Search Tree, BST)
这是一种更特殊的二叉树,它增加了一个关键规则,使得搜索效率极高:
规则: 对于树中的任意一个节点,其左子树上所有节点的值都小于该节点的值,其右子树上所有节点的值都大于该节点的值。这个规则使得查找一个值的过程就像二分查找一样。
BST 的操作:
查找:从根开始,目标值比当前节点小就往左走,大就往右走,相等就找到。
插入:类似查找,找到应该放置新节点的位置(一个空子节点位置)然后插入。
删除:稍复杂,需要考虑被删除节点是否有 0、1 或 2 个子节点。
BST 的缺陷:如果插入的数据是有序的(如 1, 2, 3, 4, 5),BST 会退化成一条链表!这时,查找的时间复杂度就从理想的 O(log n) 恶化到了最坏的 O(n)。
接下来用 C++ 代码实现二叉搜索树。
首先来看一下头文件 binary_search_tree.h,包含了 BinarySearchTree 类的声明,类中在 private 部分声明了节点的结构体 Node、根节点 root_、插入、搜索、删除、中序、前序、后序、层序,在 public 部分对外提供了 插入、搜索、删除、中序、前序、后序、层序的接口。
#ifndef BINARY_SEARCH_TREE_H_
#define BINARY_SEARCH_TREE_H_
#include <memory>
// A binary search tree implementation using smart pointers.
//
// This class provides basic operations for a binary search tree (BST),
// including insertion, search, deletion and traversal methods. It uses
// std::unique_ptr for automatic memory management, ensuring no memory leaks.
class BinarySearchTree {
public:
// Constructs an empty binary search tree.
BinarySearchTree();
// Destructor is not needed as unique_ptr automatically handles memory cleanup.
// Inserts a value into the BST.
//
// Args:
// value: The integer value to insert.
void Insert(int value);
// Searches for a value in the BST.
//
// Args:
// value: The integer value to search for.
//
// Returns:
// True if the value is found, false otherwise.
bool Search(int value) const;
// Removes a value from the BST.
//
// Args:
// value: The integer value to remove.
//
// Returns:
// True if the value was found and removed, false otherwise.
bool Remove(int value);
// Performs in-order traversal of the BST.
//
// In-order traversal visits nodes in ascending order.
void InOrder() const;
// Performs pre-order traversal of the BST.
//
// Pre-order traversal visits the root first, then left subtree, then right subtree.
void PreOrder() const;
// Performs post-order traversal of the BST.
//
// Post-order traversal visits left subtree first, then right subtree, then root.
void PostOrder() const;
// Performs level-order traversal of the BST.
//
// Level-order traversal visits nodes level by level from top to bottom and left to right.
void LevelOrder() const;
private:
// Internal node structure for the BST.
struct Node {
int data; // The value stored in the node
std::unique_ptr<Node> left; // Pointer to the left child
std::unique_ptr<Node> right; // Pointer to the right child
// Constructor for creating a new node with the given value.
//
// Args:
// value: The integer value to store in the node.
explicit Node(int value);
};
std::unique_ptr<Node> root_; // Root node of the BST
// Recursively inserts a value into the BST.
//
// Args:
// node: Reference to a unique_ptr pointing to the current node.
// value: The integer value to insert.
void Insert(std::unique_ptr<Node>& node, int value);
// Recursively searches for a value in the BST.
//
// Args:
// node: Reference to a unique_ptr pointing to the current node.
// value: The integer value to search for.
//
// Returns:
// True if the value is found, false otherwise.
bool Search(const std::unique_ptr<Node>& node, int value) const;
// Finds the minimum value in a subtree.
//
// Args:
// node: Pointer to the root of the subtree.
//
// Returns:
// The node containing the minimum value in the subtree.
Node* FindMin(Node* node) const;
// Recursively removes a value from the BST.
//
// Args:
// node: Reference to a unique_ptr pointing to the current node.
// value: The integer value to remove.
//
// Returns:
// True if the value was found and removed, false otherwise.
bool Remove(std::unique_ptr<Node>& node, int value);
// Recursively performs in-order traversal.
//
// Args:
// node: Reference to a unique_ptr pointing to the current node.
void InOrder(const std::unique_ptr<Node>& node) const;
// Recursively performs pre-order traversal.
//
// Args:
// node: Reference to a unique_ptr pointing to the current node.
void PreOrder(const std::unique_ptr<Node>& node) const;
// Recursively performs post-order traversal.
//
// Args:
// node: Reference to a unique_ptr pointing to the current node.
void PostOrder(const std::unique_ptr<Node>& node) const;
// Performs level-order traversal.
//
// Args:
// node: Reference to a unique_ptr pointing to the root node.
void LevelOrder(const std::unique_ptr<Node>& root) const;
};
#endif // BINARY_SEARCH_TREE_H_接下来看源文件 binary_search_tree.cc,包含了上述类和方法的具体实现。
比较复杂的是节点的删除操作,需要考虑待删除节点如果有 0、1、2 个子节点的情况。
#include "binary_search_tree.h"
#include <iostream>
#include <queue>
// Node constructor implementation
BinarySearchTree::Node::Node(int value)
: data(value), left(nullptr), right(nullptr) {}
// BinarySearchTree constructor implementation
BinarySearchTree::BinarySearchTree() : root_(nullptr) {}
// Public Insert method
void BinarySearchTree::Insert(int value) {
Insert(root_, value);
}
// Private recursive Insert method
void BinarySearchTree::Insert(std::unique_ptr<Node>& node, int value) {
if (node == nullptr) {
node = std::make_unique<Node>(value);
} else if (value < node->data) {
Insert(node->left, value);
} else if (value > node->data) {
Insert(node->right, value);
}
// If value == node->data, do nothing (no duplicates allowed)
}
// Public Search method
bool BinarySearchTree::Search(int value) const {
return Search(root_, value);
}
// Private recursive Search method
bool BinarySearchTree::Search(const std::unique_ptr<Node>& node, int value) const {
if (node == nullptr) return false;
if (value == node->data) return true;
if (value < node->data) return Search(node->left, value);
return Search(node->right, value);
}
// Public Remove method
bool BinarySearchTree::Remove(int value) {
return Remove(root_, value);
}
// Private recursive Remove method
bool BinarySearchTree::Remove(std::unique_ptr<Node>& node, int value) {
if (node == nullptr) return false; // Value not found
if (value < node->data) {
return Remove(node->left, value);
} else if (value > node->data) {
return Remove(node->right, value);
} else {
// Node to delete found
if (node->left == nullptr && node->right == nullptr) {
// Case 1: No children
node.reset();
} else if (node->left == nullptr) {
// Case 2: Only right child
node = std::move(node->right);
} else if (node->right == nullptr) {
// Case 3: Only left child
node = std::move(node->left);
} else {
// Case 4: Two children
Node* min_node = FindMin(node->right.get());
node->data = min_node->data;
Remove(node->right, min_node->data);
}
return true;
}
}
// FindMin method implementation
BinarySearchTree::Node* BinarySearchTree::FindMin(Node* node) const {
while (node->left != nullptr) {
node = node->left.get();
}
return node;
}
// Public InOrder method
void BinarySearchTree::InOrder() const {
InOrder(root_);
std::cout << std::endl;
}
// Private recursive InOrder method
void BinarySearchTree::InOrder(const std::unique_ptr<Node>& node) const {
if (node == nullptr) return;
InOrder(node->left);
std::cout << node->data << " ";
InOrder(node->right);
}
// Public PreOrder method
void BinarySearchTree::PreOrder() const {
PreOrder(root_);
std::cout << std::endl;
}
// Private recursive PreOrder method
void BinarySearchTree::PreOrder(const std::unique_ptr<Node>& node) const {
if (node == nullptr) return;
std::cout << node->data << " ";
PreOrder(node->left);
PreOrder(node->right);
}
// Public PostOrder method
void BinarySearchTree::PostOrder() const {
PostOrder(root_);
std::cout << std::endl;
}
// Private recursive PostOrder method
void BinarySearchTree::PostOrder(const std::unique_ptr<Node>& node) const {
if (node == nullptr) return;
PostOrder(node->left);
PostOrder(node->right);
std::cout << node->data << " ";
}
// Public LevelOrder method
void BinarySearchTree::LevelOrder() const {
LevelOrder(root_);
std::cout << std::endl;
}
// Private LevelOrder method
void BinarySearchTree::LevelOrder(const std::unique_ptr<Node>& root) const {
if (root == nullptr) {
std::cout << "Tree is empty" << std::endl;
return;
}
// 使用裸指针队列进行层序遍历是安全的,因为:
// 1. 遍历期间树的结构不会改变(此函数是const的)
// 2. 裸指针只在函数局部使用,不影响所有权
// 3. std::unique_ptr 仍然拥有节点的完整所有权
std::queue<Node*> node_queue;
node_queue.push(root.get());
while (!node_queue.empty()) {
Node* current = node_queue.front();
node_queue.pop();
std::cout << current->data << " ";
if (current->left != nullptr) {
node_queue.push(current->left.get());
}
if (current->right != nullptr) {
node_queue.push(current->right.get());
}
}
}最后看 main.cc,编译运行查看测试效果。
#include "binary_search_tree.h"
#include <iostream>
int main() {
BinarySearchTree bst;
// Insert some values
bst.Insert(50);
bst.Insert(30);
bst.Insert(70);
bst.Insert(20);
bst.Insert(40);
bst.Insert(60);
bst.Insert(80);
// Perform traversals
std::cout << "In-order traversal: ";
bst.InOrder();
std::cout << "Pre-order traversal: ";
bst.PreOrder();
std::cout << "Post-order traversal: ";
bst.PostOrder();
std::cout << "Level-order traversal: ";
bst.LevelOrder();
// Search for values
std::cout << "Search for 40: " << (bst.Search(40) ? "Found" : "Not found") << std::endl;
std::cout << "Search for 90: " << (bst.Search(90) ? "Found" : "Not found") << std::endl;
// Remove a value
std::cout << "Removing 20: " << (bst.Remove(20) ? "Success" : "Not found") << std::endl;
std::cout << "In-order traversal after removal: ";
bst.InOrder();
return 0;
}g++ binary_search_tree.cc main.cc -o main
./main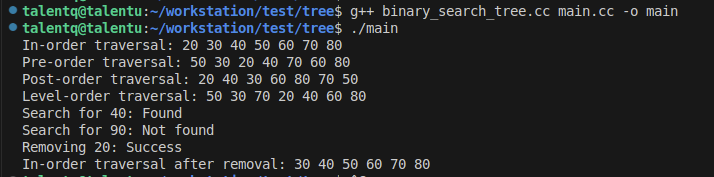
3 平衡二叉树:AVL树和红黑树
为了解决 BST 可能退化的问题,引入了自平衡二叉搜索树。它们通过在插入和删除时进行自动调整(旋转),来保持树的高度大致为 O(log n)。两种最重要的平衡树:AVL树、红黑树
3.1 AVL 树
AVL树是一种高度平衡的二叉搜索树,它通过维护一个平衡因子来确保树的平衡。平衡因子 = 左子树高度 - 右子树高度。对于任何节点,其左子树和右子树的高度差(平衡因子)绝对值不超过 1。
查找性能极高:由于严格平衡,查找时间复杂度稳定在O(log n)
插入/删除代价高:可能需要多次旋转来维持平衡
适合读多写少的场景:如数据库索引、字典等
当插入或删除操作导致平衡因子超出范围时,需要通过旋转来恢复平衡:
左旋 (Left Rotation):用于处理右子树过高的情况
右旋 (Right Rotation):用于处理左子树过高的情况
左右旋 (Left-Right Rotation):先左旋后右旋
右左旋 (Right-Left Rotation):先右旋后左旋
3.2 红黑树
红黑树是一种大致平衡的二叉搜索树。通过五个规则来确保没有路径会比其他路径长出两倍。它是 C++ STL 中 std::map, std::set, std::multimap, std::multiset 的底层实现容器。
特点: 它不是高度平衡的,但可以保证从根到叶子的最长路径不会超过最短路径的两倍。这是一种折中,虽然查找比 AVL 稍慢,但插入和删除的效率更高,需要的旋转操作更少。
特点:
插入/删除性能好:相比AVL树,需要的旋转操作更少
查找性能稍差:没有AVL树那么平衡,但仍是O(log n)
综合性能均衡:适合频繁插入删除的场景
五条规则:
每个节点是红色或黑色
根节点是黑色
所有叶子节点(NIL)是黑色
红色节点的子节点必须是黑色(不能有连续红色节点)
从任一节点到其每个叶子的所有路径都包含相同数目的黑色节点
当插入或删除违反规则时,通过以下操作恢复平衡:
变色 (Recoloring):改变节点颜色
旋转 (Rotation):与 AVL 树类似的旋转操作
3.3 为什么 C++ STL 选择红黑树
主要是因为STL中的map和set等关联容器需要频繁执行插入和删除操作,而红黑树在整体性能上提供了更好的平衡。它牺牲了少量严格的平衡性来换取更高效的插入和删除效率,这对于STL的通用设计哲学更为重要。
这是一个典型的工程上的权衡(Trade-off)。虽然AVL树在查找上有着理论上的优势,但C++ STL的设计者经过权衡后认为,对于其目标应用场景(需要大量增删改查的通用编程),红黑树在整体性能和实现复杂度上提供了更好的折衷。
在实际硬件上,由于缓存等原因,红黑树较少的旋转操作也带来了更好的性能表现。
4 扩展
如何计算一棵树的高度/最大深度?
int MaxDepth(std::unique_ptr<Node>& node) {
if (node == nullptr) return 0;
return std::max(MaxDepth(node->left), MaxDepth(node->right)) + 1;
}如何判断两颗二叉树是否相同?
bool IsSameTree(std::unique_ptr<Node>& p, std::unique_ptr<Node>& q) {
if (p == nullptr && q == nullptr) return true;
if (p == nullptr || q == nullptr) return false;
if (p->data != q->data) return false;
return IsSameTree(p->left, q->left) && IsSameTree(p->right, q->right);
}如何判断一棵二叉树是否是对称二叉树/镜像对称的?
bool IsISymmetrical(std::unique_ptr<Node>& node) {
if (node == nullptr) return true;
std::unique_ptr<Node>& p = node->left;
std::unique_ptr<Node>& q = node->right;
return IsISymmetricalPQ(p, q);
}
bool IsISymmetricalPQ(std::unique_ptr<Node>& p, std::unique_ptr<Node>& q) {
if (p == nullptr && q == nullptr) return true;
if (p == nullptr || q == nullptr) return false;
if (p->data != q->data) return false;
return IsISymmetricalPQ(p->left, q->right) && IsISymmetricalPQ(p->right, q->left);
}如何使用迭代的方式实现二叉树的前序、中序、后序遍历?
void PreOrderByStack(std::unique_ptr<Node>& root) {
if (root == nullptr) return;
std::stack<Node*> s;
s.push(root.get());
while (!s.empty()) {
Node* current = s.top();
s.pop();
std::cout << current->data << " ";
if (current->right != nullptr) s.push(current->right.get());
if (current->left != nullptr) s.push(current->left.get());
}
}
void InOrderByStack(std::unique_ptr<Node>& root) {
if (root == nullptr) return;
std::stack<Node*> s;
Node* current = root.get();
while (current != nullptr || !s.empty())
{
while (current != nullptr) {
s.push(current);
current = current->left.get();
}
current = s.top();
s.pop();
std::cout << current->data << " ";
current = current->right.get();
}
}
void PostOrderByStack(std::unique_ptr<Node>& root) {
}C++ STL 中的 map(或 set)底层是如何实现的?它有什么特点?
底层通常是红黑树(一种自平衡二叉搜索树)。
元素是自动排序的(按 key 排序)。
查找、插入、删除操作的时间复杂度都是 O(log n)。
支持高效的区间遍历和范围查询。
对比
unordered_map:unordered_map底层是哈希表,元素无序,但平均查找时间复杂度是 O(1)。
为什么 std::map 选择红黑树而不是 AVL 树作为底层结构?
虽然 AVL 树更平衡,查找更快(O(log n)),但红黑树在插入和删除操作时需要更少的旋转来维持平衡,整体性能更均衡。对于需要频繁插入删除的通用关联容器(如 std::map),红黑树是更好的选择。
什么是线索二叉树?它有什么用处?
答:在线索二叉树中,所有为
nullptr的左、右指针被重新利用:如果一个节点的左指针为空,则让它指向其前驱节点;如果右指针为空,则指向其后继节点(这里的“前驱”和“后继”指的是中序遍历序列中的前后关系)。用处:它使得在不使用栈或递归的情况下进行中序遍历成为可能,并且可以更快地找到前驱和后继节点。它节省了内存空间(不需要为每个节点维护指向父节点的指针),但增加了复杂性。
评论区